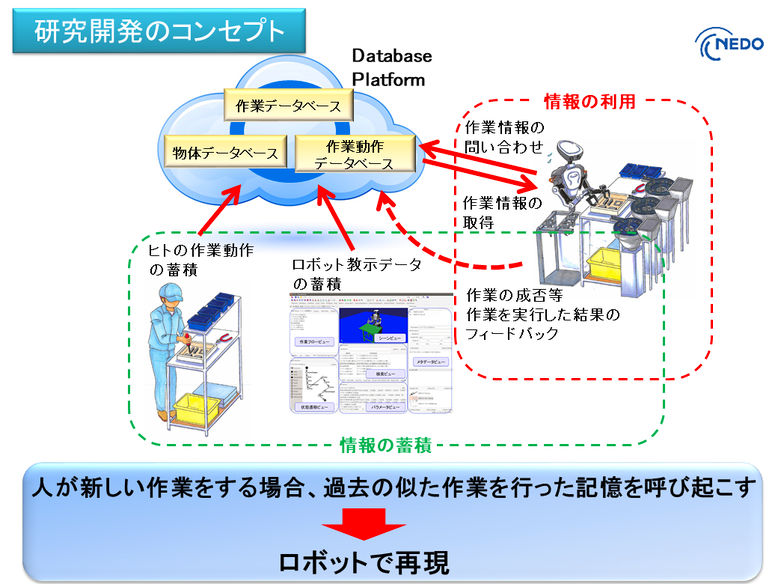
ヒトが行ってきた作業をロボットによって代替することを考え、特に部品供給作業と製品組立作業を題材として挙げている。ヒトのメカニズムに習い、ヒトの作業動作や教示ツールで得られた作業動作をデータベースに蓄積させ、ロボットが必要に応じてダウンロードする枠組みを考えた。ここでは、このフレームワークに含まれる、いくつかの主要なツールを公開。
詳細は、次のホームページを参照してください。
| 研究開発プロジェクト | NEDO 次世代人工知能・ロボット中核技術開発の成果 |
| 研究機関 | 国立研究開発法人 産業技術総合研究所 国立大学法人 大阪大学(大阪府豊中市)[産総研からの再委託] 国立大学法人 金沢大学(石川県金沢市)[産総研からの再委託] 学校法人中部大学(愛知県春日井市)[産総研からの再委託] |
| 主要研究者 | 原田 研介(産業技術総合研究所、大阪大学) 辻 徳生(金沢大学) 藤吉 弘亘(中部大学) 堂前 幸康(産業技術総合研究所)< |
| 関連URL | https://nedo-robot-ai.jimdofree.com/ |