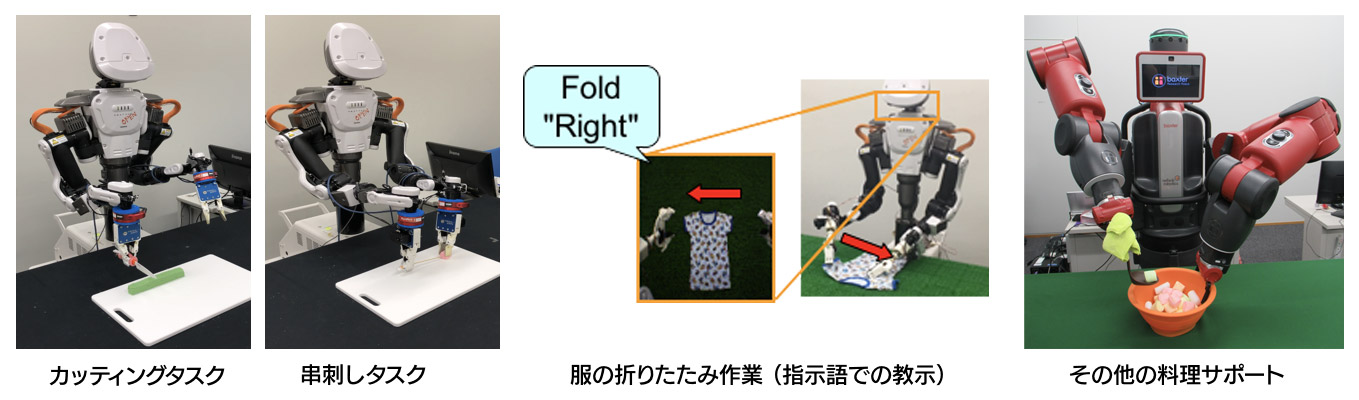
人間と協働するロボットの動作教示には以下の問題がある。(1)動作軌道の教示のみでは環境変化へ対応が困難、(2)動作教示に多くの時間が必要、本課題では、(1)深層学習モデルにより、動作、映像、力覚などの順逆モデルをEnd-to-End方式で学習し、環境適応能力の高い動作モデルを構築する。(2)ダイレクトティーチングシステムおよび転移学習を用い、人間の動作映像から模倣学習を行うシステムを構築する。本システムにより、日常タスクなどロボットを多様なタスクに導入できるようになると期待される。
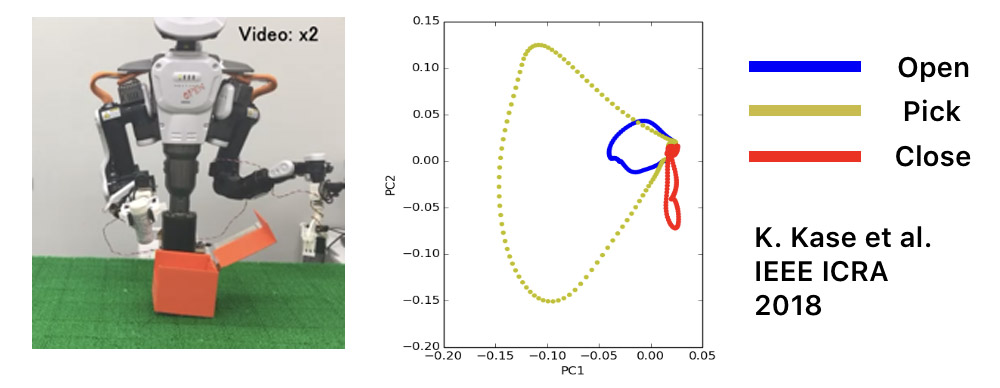
複数動作の順逆モデルの学習(単一深層学習モデルへの埋込手法開発と内部表現の解析)
| 研究開発プロジェクト | NEDO 次世代人工知能・ロボット中核技術開発の成果 |
| 研究機関 | 国立研究開発法人 産業技術総合研究所 学校法人 早稲田大学(東京都新宿区)[ 産総研からの再委託 ] |
| 主要研究者 | 尾形 哲也(産業技術総合研究所、早稲田大学) |