採用情報
アクセス
お問い合わせ
EN
AIRCについて
ご挨拶
センター概要
組織図
フォトギャラリー
研究チーム
研究開発成果
AI活用分野
空間の移動
製造業
サービス業
健康・医療・介護
安心・安全
基礎技術
インフラ
採用情報
アクセス
お問い合わせ
ACHIEVEMENTS
トップページ
研究開発成果
物体の機能認識
物体の機能認識
認識・モデル化・予測モジュール
研究のポイント
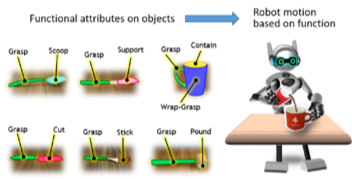
コップやスプーンなどの日用品における「カタチから想起される機能」を認識
2D/3Dデータと機械学習(DNN)を用いて,部位ごとの「機能」をモデルレスで推定
認識された機能情報を利用すれば,ロボットが道具の使い方を把握することができ,動作パラメータの算出に利用可能
機能認識のために,7種の機能属性ラベル付きの日用品データ220個を整備
キーワード:
機能属性
機能認識
深層学習
日用品
アフォーダンス
モジュール・データの概要
コップやスプーンなどの日用品は,”Contain”や”Grasp”など、使用目的に応じた機能を持っており,それらの機能が「カタチ」に表現されていることが多い.
対象物の形状から機能を認識すれば,ロボットが自ら動作を生成することができる。
例:
ジュースをコップの“Contain”の中央に注ぐ
スプーンの “Grasp”を把持して,”Scoop”で掬う
2D/3Dデータを用いて,DNNにより機能属性の仮ラベルを付与.さらに確率モデルを用いて,ラベル間の整合性をもとに最適化.
機能を利用してロボットの動作パラメ ータを自動決定
想定されるアプリケーション
工場における部品認識
工場では,作り込まれた機能は同じだが形が少しずつ異なる部品が多い.本技術を用いれば,機能に着目したロボットモーションを自動生成することができるので,ロボットティーチングの効率化が期待される
工場における工具使用作業の自動化(レンチ,ドライバーなど)
家庭における作業ロボット(調理支援など)
研究開発プロジェクト
NEDO 次世代人工知能・ロボット中核技術開発の成果
研究機関
学校法人梅村学園 中京大学(愛知県名古屋市)[ 産総研からの再委託 ]
主要研究者
橋本 学(中京大学)
関連URL
日用品のデータ(機能属性ラベル付き)
トップページ
研究開発成果
物体の機能認識
研究開発成果
時間領域アナログ方式による海馬・扁桃体・前頭前野の物理モデル化
物体の機能認識
動画データセット+動作認識、説明生成(情報抽出)
柔軟物操作
生命科学文献からのデータ作成をAIでアシスト
模倣学習
日用品データセット + 3Dデータベース
クラウド型画像解析エンジン
RotationNet + 多視点画像データセット