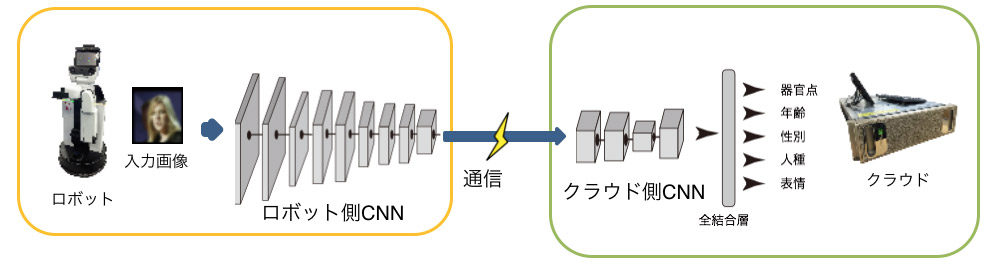
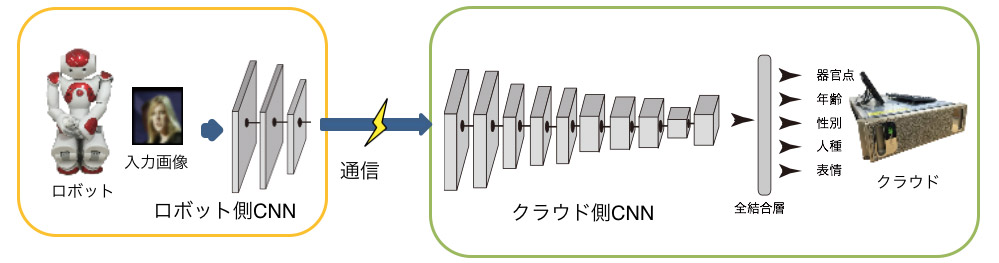
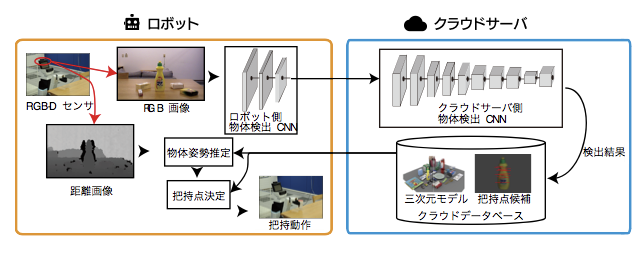
生活支援ロボットの社会的導入が求められている。生活支援ロボットには、コストや大きさ、消費電力の観点から搭載できる計算機の能力は低い。そのため、画像解析を行うアルゴリズムの搭載が難しい。本研究では、計算コストが高い畳み込みニューラルネットワークの処理を、ロボットとクラウドで分割して処理するシステムを開発する。これによりロボットの計算量を削減できる。また、直接画像を送るのではなく、畳込み処理により得られる特徴マップを送信するため、プライバシーに配慮できる。畳み込み処理をどの程度ロボットで行い、残りをクラウドで行うかを、ロボットおよびクラウドの計算能力や通信状況によって動的に変更し、効率的な処理を行う。
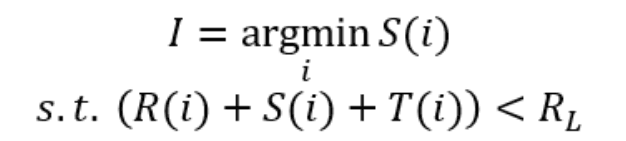
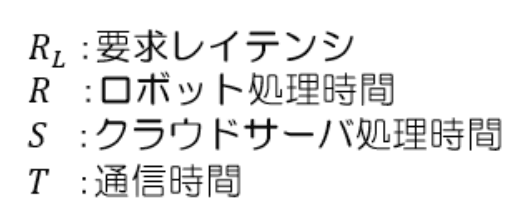
※要求レイテンシ:許容できる待ち時間
| 研究開発プロジェクト | NEDO 次世代人工知能・ロボット中核技術開発の成果 |
| 研究機関 | 学校法人 中部大学(愛知県春日井市)[ 産総研からの再委託 ] |
| 主要研究者 | 藤吉 弘亘(中部大学) |