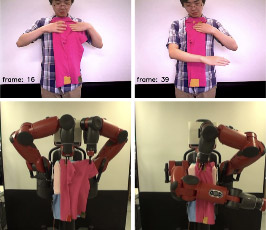
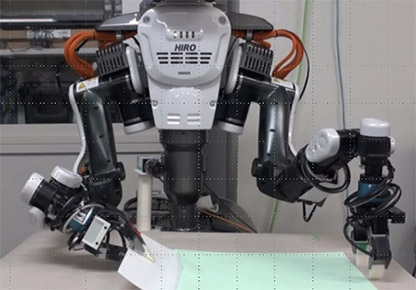
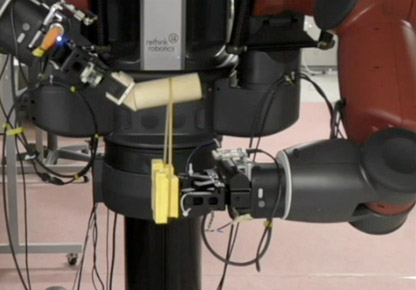
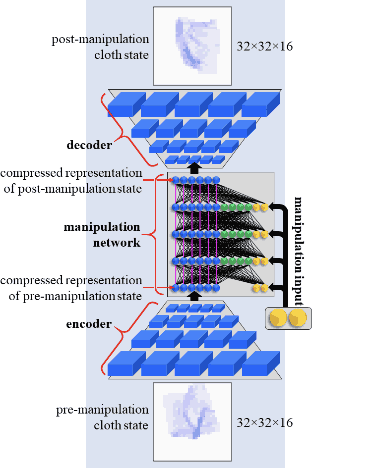
紐、紙、布などの不定形物は、そのふるまいを計算機上で生成・予測することが難しい。これは、不定形物操作の自動化があまり進んでいないことの大きな要因である。本研究開発では、不定形物操作のための知識表現を始めとして,認識や動作計画の手法を新たに提案するとともに、人からの効率的な作業教示,ロボット自身による探索的行動獲得の方式を提案して、不定形物に関わる様々な作業を実現可能にする。研究のポイントは、不定形物操作に適した種々の機能を見える化しつつ、シンプルな学習プロセスで操作能力を獲得可能にするところにある。
| 研究開発プロジェクト | NEDO 次世代人工知能・ロボット中核技術開発の成果 |
| 研究機関 | 国立大学法人 信州大学(長野県松本市)[ 産総研からの再委託 ] 国立大学法人 奈良先端科学技術大学院大学(奈良県生駒市)[ 産総研からの再委託 ] |
| 主要研究者 | 山崎 公俊(信州大学)、松原 崇充(奈良先端科学技術大学院大学) |