大規模なダイナミクス環境において、ロボット等のエージェントにベイズ推定としての行動決定をさせるのは容易でない。環境ダイナミクスのモデリング作業も、目的関数の設計も困難であり、計算コストも高い。そこで我々は、環境を複数の小規模モデルをつなぎ合わせたネットワークの形で表現する一般的な方法と、これを容易に実装可能なソフトウェアパッケージを開発した。提案法によれば、複数のセンサー情報や複数の部品からなる複雑な制御対象を、小規模モデルを部品として相互結合させることで同時に効率的に取り扱うことができ、また部品毎に生じ得るノイズや故障に対して頑健な動作生成が期待できる。
提案法は世の中で広く用いられている状態空間モデルの拡張であり、外部環境に関する知覚信号の時系列から、環境に関する内部モデルの状態変数を推定することが目的である。提案法の特徴は、環境を複数の小規模状態空間モデルに分割し、それぞれの状態を互いに予測させ、予測誤差を減少させるべく更新してゆく仕組みにある。環境モデルの設計者は、小規模な部品をひとつずつ設計し、部品毎に目的を設計し、これらを組み合わせることで全体として整合的に動く頑健な制御系を作ることができる。また、こうして作った部品は環境を共有する類似タスク間で使い回すことができ、全体として設計過程の省力化が期待できる。
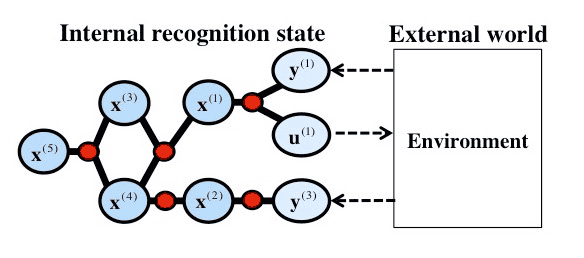
複数種類のセンサー情報、複数種類の制御対象オブジェクトから成る複雑なシステムの実時間制御を行いたいが、制御対象の力学系全体のモデリングが困難であるような場合。
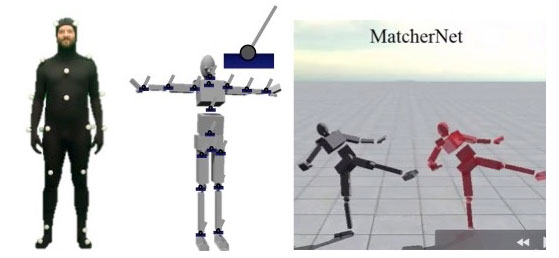
例:モーションキャプチャと近似的な物理制約モデルを組み合わせることによってCGキャラクタの自然な動作生成を実現した。
| 研究開発プロジェクト | NEDO 次世代人工知能・ロボット中核技術開発の成果 |
| 研究機関 | 国立大学法人 京都大学 [ 産総研からの再委託 ] |
| 主要研究者 | 大羽 成征 |
| 関連URL | ソースコード |