関心とは、その人が心の中で重要、あるいは何らかの価値があると感じたときに示す行動です。認知科学では人の行動決定は広義の価値計算に依存すると考えられています。そのため、他者の関心が推定できるなら、その人物の行動予測や好みの推定ができるようになります。
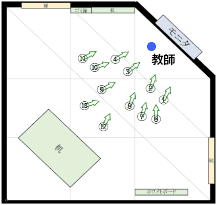
私たちは何かに関心を持つとき、対象をじっと見ることで情報を得ます。本モジュールはその姿を壁に設置したセンサーで観察し、その人物の位置と向きを知ることで、その人の関心対象を推定します。これを本研究では、幼稚園や小学校低学年の生徒を対象に行い、園の活動中や授業中の子ども達の関心対象からその個性を推定することを目指しています。
本モジュールは、センサシステムと関心推定モデルからなります。
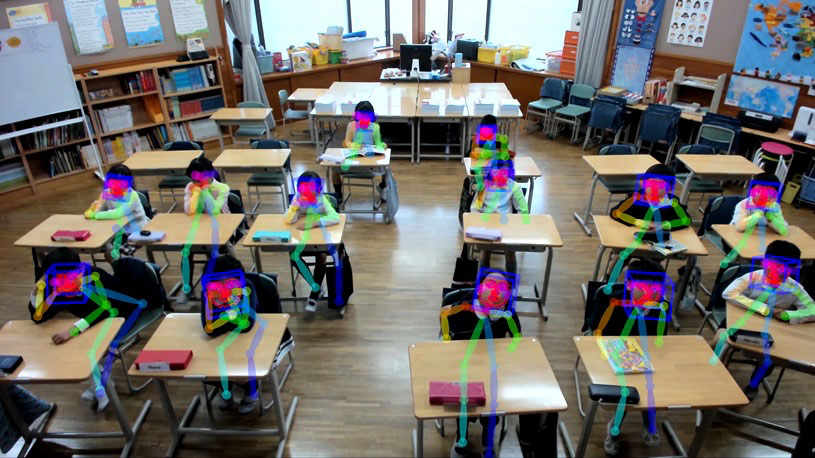
センサシステムは、例えば教室などに設置された複数のステレオカメラで、10fpsで生徒の3次元的な位置と向きを観察します。人数・年齢・性別などの制約はなく、多方面から同期して撮像するので、人物の重なりなどは回避した画像が得られやすくなっています。
関心推定モデルは、対象の人物が何かを注視している状態を検出し、その視線の先にある関心対象の確率尤度を計算します。視線の遠くから検出は難しいので,顔特徴抽出や身体骨格推定のAI技術を利用し、顔の向き、あるいは体の向きで視線の代用としています。
子どもの場合は頭の向きから約70%の精度で関心対象が推定できました。
人の関心対象が判ると、そのときの活動と組み合わせて、活動への参加の程度が推定できます。その活動の種類や特性などと組み合わせると、個々人の好み・得意不得意なども推定できると期待されます。
[1]
初等教育、特に保育所や小学校低学年の活動観察
園児・生徒の個々人の授業や活動への参加が判るなら、個々の個性・特性に応じた教育支援が可能となります。個性に応じた教育という、現代教育に求められながら人手不足でなかなかできない体制が、その一部の作業をAI技術でカバーすることで実現しやすくなります。個人のデータは、右下に示す骨格情報にして扱います。

[2]
対人サービスロボットのインタラクション
対人サービスの基本は相手の状態に合わせた行動です。しかし、人の状態、特に心の状態を推定するのは困難なことが多いです。本モジュールはそのような場面で、人の行動を観察することで、その人は何に関心を向けているかを推定し、それに合わせた声かけやサービスのタイミングを決められます。
| 研究開発プロジェクト | NEDO 次世代人工知能・ロボット中核技術開発の成果 |
| 研究機関 | 学校法人玉川学園 玉川大学 [ 産総研からの再委託 ] |
| 主要研究者 | 大森 隆司 |