脳波や筋電などの生体情報は、実世界から得られる時系列データの典型的なものであり、近年、スマートウォッチや着脱が容易な筋電センサなど、容易に装着して日常的に使用できる IoT
センサの普及により、その利活用へのニーズが高まっている。
しかし、着脱容易な筋電センサの信号から、運動を推定する手法はまだ十分に研究されておらず、また、着脱によるセンサ位置のずれが認識精度を悪化させ、長期の使用を困難にしている。
そこで、そうしたセンサを用いて上腕の運動を識別する手法を開発し、モジュール化することで、簡易なセンサでも義手の制御などに適用可能であることを示した。
センサの位置ずれに対しても、転移学習を適用することで、少量の追加データで認識精度を安定化させられることを示した。
MATLAB のソースコードを公開
https://github.com/aistairc/ADAMECS
実験の詳細に関する論文
S. Kanoga, M. Matsuoka, A. Kanemura, Transfer learning over time
and placement in wearable myoelectric control systems, Proceeding of 2018 IEEE Engineering in Medicine and
Biology Society (EMBC), 2018.
doi. 10.1109/EMBC.2018.8512872
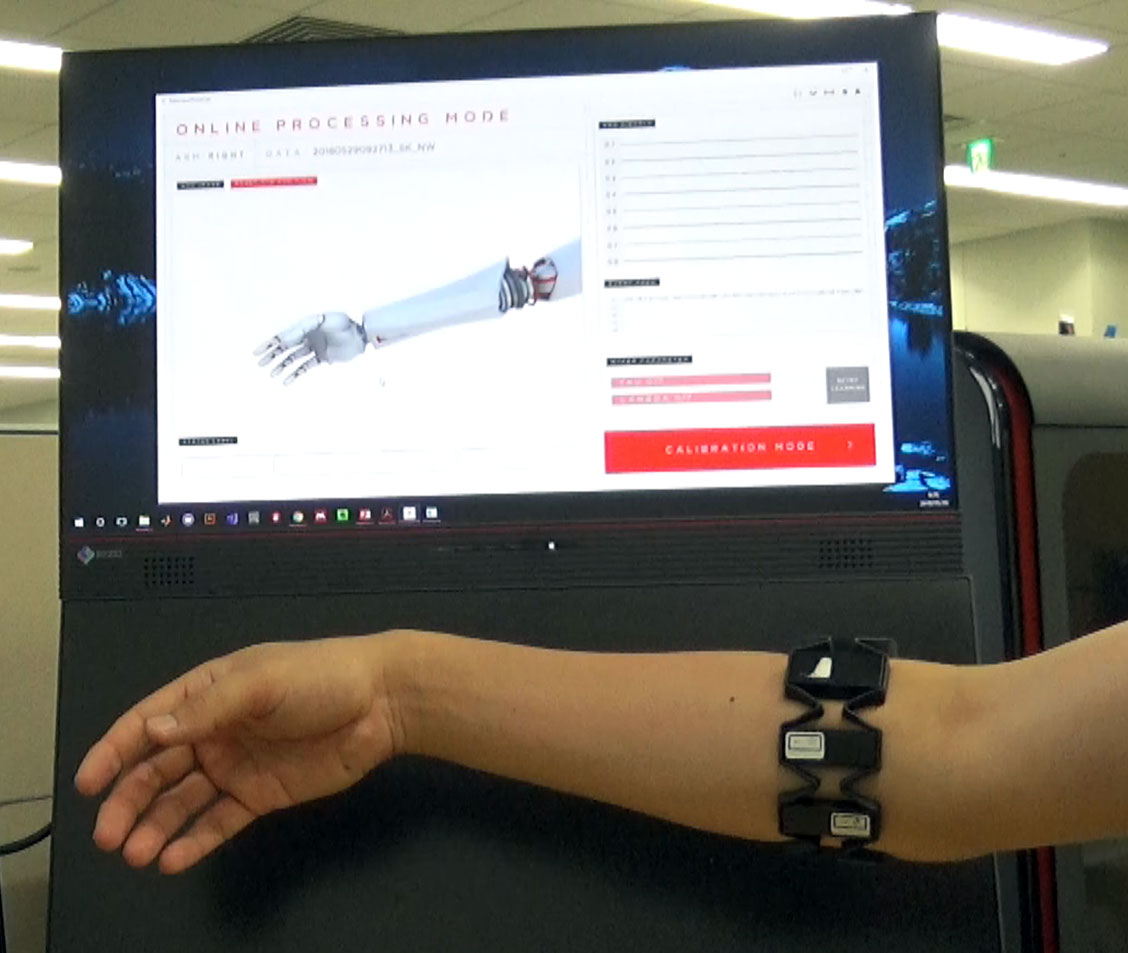
着脱容易な筋電センサによるロボットや義手の制御
上腕に装着したセンサによる運動の識別とロボット義手(シミュレーション)制御のデモ
| 研究開発プロジェクト | NEDO 次世代人工知能・ロボット中核技術開発の成果 |
| 研究機関 | 国立研究開発法人 産業技術総合研究所 |
| 主要研究者 | 叶賀 卓 |