人体特性文献データベース|2.関節受動抵抗文献-肘
肘
- Engin 1979 |前腕回内外
- Engin 1987
- Gomi 1998 |水平屈伸
- Hatze 1997
- Hatze 1997 |前腕回内外
- Hayes 1977
- HQL 2000
- Xu 1998
- Xu 1999
Engin-79-04
| 筆者 | Engin, A.E. |
| タイトル | Passive Resistive Torques about Long Bone Axes of Major Human Joints |
| 掲載誌 | Aviat. Space, Environ, Medic. |
| 巻号・ページ | 50巻10号 p.1052-1057 |
| 年 | 1979 |
| 関連文献 |
Engin-79-01 Engin-79-02 Engin-79-03 Engin-79-05 |
| 対象 |
関節:肘 回転方向:回旋 特性:弾性 |
| 計測条件 |
被験者:男性3名 年齢範囲:- 計測国:アメリカ 方法:準静的釣り合いによる推定(type 1-3) |
| 定義 |
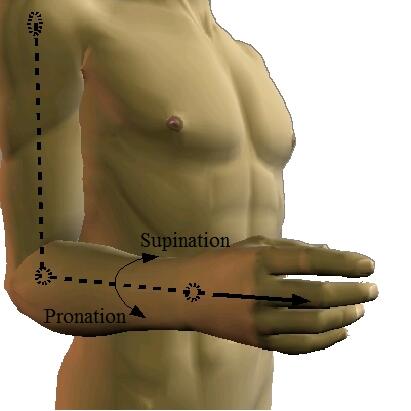
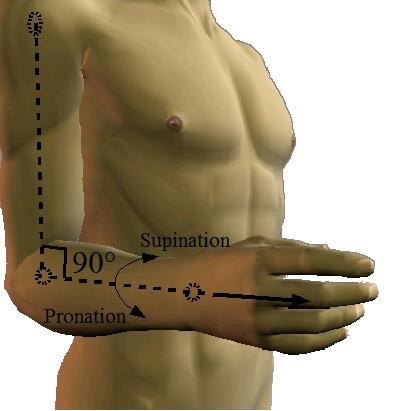 右図参照のこと.
右図参照のこと.肘関節を90度屈曲させた時の上腕節の回旋で肘関節回旋角度を定義した.0位は定義されていないが,自然位を0位としているようだ. |
| 計測結果の表現方法 |
関節角度に対する非線形弾性特性モーメントのグラフ 関数形は示されていない. |
| 特徴 |
|
Engin-87-01
| 筆者 | Engin, A.E. and Chen, S.M. |
| タイトル | Kinematic and Passive Resistive Properties of Human Elbow Complex |
| 掲載誌 | Trans. ASME J. Biomech. Eng. |
| 巻号・ページ | 109巻4号 p.318-323 |
| 年 | 1987 |
| 関連文献 | |
| 対象 |
関節:肘 回転方向:伸展 特性:弾性 |
| 計測条件 |
被験者:男性10名 年齢範囲:18-32 計測国:アメリカ 方法:準静的釣り合いによる推定(type 1-2) |
| 定義 |
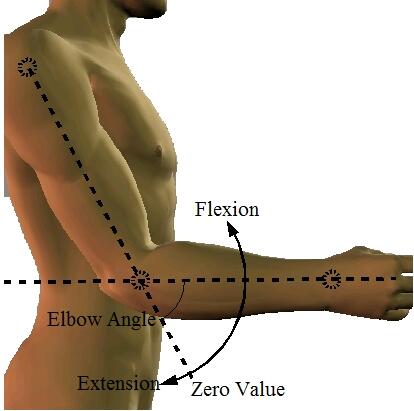
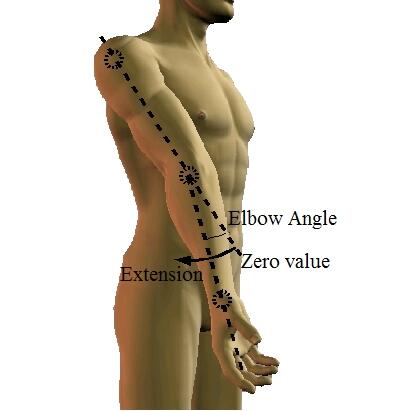 右図参照のこと.
右図参照のこと.肘関節角度は,上腕節から見た前腕節の角度として表わされる.ただし,詳細は文献を参照されたい. |
| 計測結果の表現方法 |
肘伸展角度に対する3次関数(単位:Nm) |
| 特徴 |
|
Gomi-98-02
| 筆者 | Gomi, H. and Osu, R |
| タイトル | Task-Dependent Viscoelasticity of Human Multijoint Arm and Its Spatial Characteristics for Interaction with Environments |
| 掲載誌 | J. Neuroscience |
| 巻号・ページ | 18巻21号 p.8965-8978 |
| 年 | 1998 |
| 関連文献 | Gomi-98-01 |
| 対象 |
関節:肘 回転方向:屈伸(水平屈伸) 特性:粘弾性 |
| 計測条件 |
被験者:男性2名 女性2名 年齢範囲:23-34 計測国:日本 方法:動的釣り合いによる推定(type 2-2) |
| 定義 |
 右図参照のこと.
右図参照のこと. |
| 計測結果の表現方法 |
関節角度に対する線形粘性・弾性受動抵抗係数のグラフ 関数形は示されていない. |
| 特徴 |
|
Hatze-97-01
| 筆者 | Hatze, H. |
| タイトル | A three-dimensional multivariate model of passive human joint torques and articular boundaries |
| 掲載誌 | Clin. Biomech. |
| 巻号・ページ | 12巻2号 p.128-135 |
| 年 | 1997 |
| 関連文献 |
Hayes-77-01 Hatze-97-02 |
| 対象 |
関節:肘 回転方向:屈伸 特性:弾性 |
| 計測条件 |
被験者:男性1名 年齢範囲:29 計測国:オーストリア 方法:準静的釣り合いによる推定(type 1-3) |
| 定義 |
 右図参照のこと.
右図参照のこと.手首の回旋の定義はHatze-97-02を参照のこと. |
| 計測結果の表現方法 |
関節角度に対する非線形弾性特性モーメントのグラフ 関数形は示されていない. |
| 特徴 |
|
Hatze-97-02
| 筆者 | Hatze, H. |
| タイトル | A three-dimensional multivariate model of passive human joint torques and articular boundaries |
| 掲載誌 | Clin. Biomech. |
| 巻号・ページ | 12巻2号 p.128-135 |
| 年 | 1997 |
| 関連文献 |
Hayes-77-01 Hatze-97-01 |
| 対象 |
関節:肘 回転方向:回旋(前腕回内外) 特性:弾性 |
| 計測条件 |
被験者:男性1名 年齢範囲:29 計測国:オーストリア 方法:準静的釣り合いによる推定(type 1-3) |
| 定義 |
 右図参照のこと.
右図参照のこと.手首の回旋の定義はHatze-97-01を参照のこと. |
| 計測結果の表現方法 |
・関節角度に対する非線形弾性特性モーメントのグラフ ・関数形は示されていない. |
| 特徴 |
|
Hayes-77-01
| 筆者 | Hayes, K.C. and Hatze, H. |
| タイトル | Passive Visco-Elastic Properties of the Structures Spanning the Human Elbow Joint |
| 掲載誌 | Europ. J. appl. Physiol. |
| 巻号・ページ | 37巻4号 p.265-274 |
| 年 | 1977 |
| 関連文献 |
Hatze-97-01 Hatze-97-02 |
| 対象 |
関節:肘 回転方向:屈伸 特性:粘弾性 |
| 計測条件 |
被験者:男性3名 年齢範囲:26-29 計測国:カナダ 方法:動的釣り合いによる推定(type 2-1) |
| 定義 |
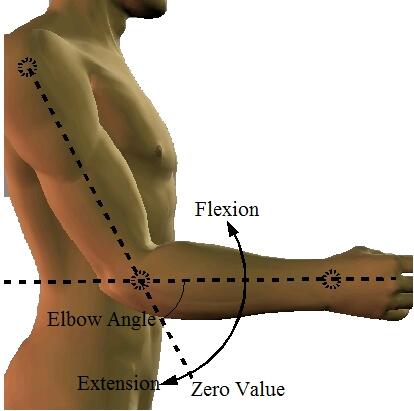
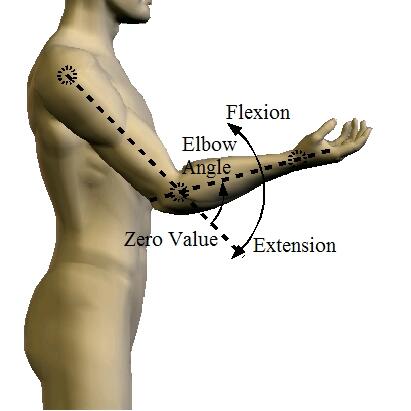
 右図参照のこと.
右図参照のこと. |
| 計測結果の表現方法 |
弾性:関節角度に対する弾性モーメントのグラフ(関数形はなし) 粘性:関節角度の2次関数(単位:Nms/deg)  |
| 特徴 |
|
HQL-00-02
| 筆者 | 社団法人人間生活工学研究センター |
| タイトル | 平成10年度即効的知的基盤整備委託調査研究 「人間の動作等に係る動的特性の計測評価」(関節特性計測)調査報告書 |
| 掲載誌 | |
| 巻号・ページ | |
| 年 | 2000 |
| 関連文献 |
HQL-00-01 HQL-00-03 HQL-00-04 HQL-00-05 HQL-00-06 NITE 人間特性DB NITE 基本動態計測手法 |
| 対象 |
関節:肘 回転方向:屈伸 特性:弾性 |
| 計測条件 |
被験者:男性112名 女性122名 年齢範囲:20-79 計測国:日本 方法:準静的釣り合いによる推定(type 1-1) |
| 定義 |
 右図参照のこと.
右図参照のこと. |
| 計測結果の表現方法 | |
|
関節角度に対する指数関数 男性右側:  世代別・性別・左右別の関数は本論参照のこと. |
|
| 特徴 |
|
Xu-98-01
| 筆者 | Xu, Y., and Hollerbach, J.M. |
| タイトル | Position Dependence of Ankle Joint Dynamics-I. Passive Mechanics |
| 掲載誌 | IEEE Trans. Biomed. Eng. |
| 巻号・ページ | 45巻8号 p.1051-1060 |
| 年 | 1998 |
| 関連文献 | Xu-99-01 |
| 対象 |
関節:肘 回転方向:屈伸 特性:粘弾性 |
| 計測条件 |
被験者:男性4名 女性1名 年齢範囲:22-26 計測国:アメリカ 方法:動的釣り合いによる推定(type 2-2) |
| 定義 |
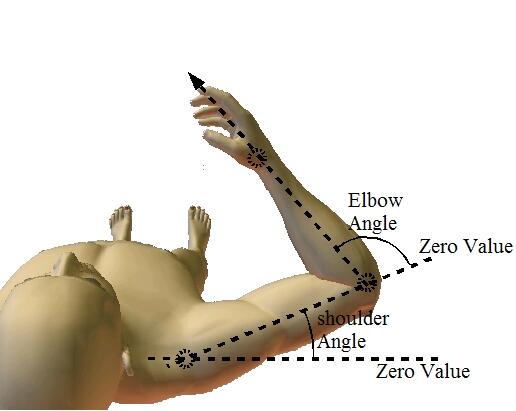
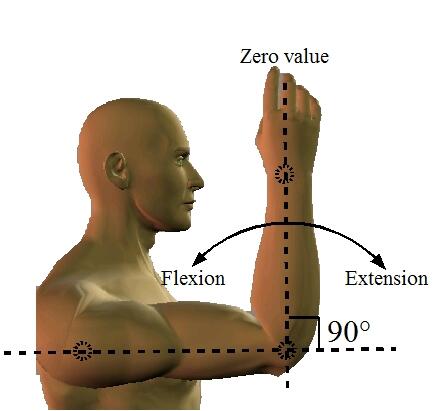 右図参照のこと.
右図参照のこと.肘関節角度の0位は,水平面に平行に上腕節を沿わせ,鉛直に上腕節を立てたときとしている. |
| 計測結果の表現方法 |
関節角度に対する粘弾性係数(および慣性モーメント)のグラフ 関数形は示されていない |
| 特徴 |
|
Xu-99-01
| 筆者 | Xu, Y., and Hollerbach, J.M. |
| タイトル | A Robust Ensemble Data Method for Identification of Human Joint Mechanical Properties During Movement |
| 掲載誌 | IEEE Trans. Biomed. Eng. |
| 巻号・ページ | 46巻4号 p.409-419 |
| 年 | 1999 |
| 関連文献 | Xu-98-01 |
| 対象 |
関節:肘 回転方向:屈伸 特性:粘弾性 |
| 計測条件 |
被験者:男性3名 女性1名 年齢範囲:22-32 計測国:アメリカ 方法:動的釣り合いによる推定(type 2-2) |
| 定義 |
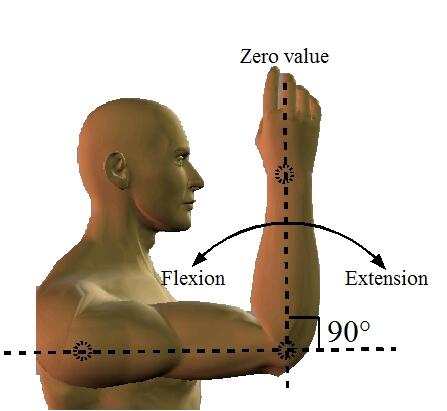 右図参照のこと.
右図参照のこと.肘関節角度の0位は,水平面に平行に上腕節を沿わせ,鉛直に上腕節を立てたときとしている. |
| 計測結果の表現方法 |
関節角度に対する粘弾性係数(および慣性モーメント)のグラフ 関数形は示されていない. |
| 特徴 |
|
 Copyright 2001-2003, Digital Human Laboratory, AIST.
Copyright 2001-2003, Digital Human Laboratory, AIST.
Copyright 2003-2015, Digital Human Research Center, AIST.
Copyright 2015-2018, Digital Human Research Group, HIRI, AIST.
Copyright 2018-2026, Digital Human Research Team, Artificial Intelligence Research Center, AIST.
All rights reserved. No reproduction or republication without written permission.