人体特性文献データベース|2.関節受動抵抗文献-足関節
足関節
Edrich-00-01
| 筆者 | Edrich, T., Riener, R. and Quintern, J. |
| タイトル | Analysis of Passive Elastic Joint Moments in Paraplegics |
| 掲載誌 | IEEE Trans. Biomed. Eng. |
| 巻号・ページ | 47巻8号 p.1058-1065 |
| 年 | 2000 |
| 関連文献 |
Edrich-00-02 Edrich-00-03 Riener-99-01 Riener-99-02 Riener-99-03 |
| 対象 |
関節:足関節 回転方向:屈伸(背屈-底屈) 特性:弾性 |
| 計測条件 |
被験者:対麻痺男性3名 対麻痺女性3名 年齢範囲:23-40 計測国:ドイツ 方法:準静的釣り合いによる推定(type 1-1) |
| 定義 |
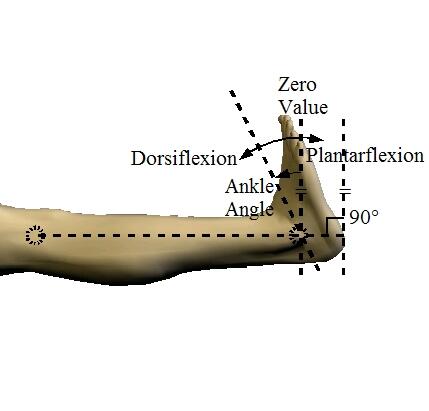
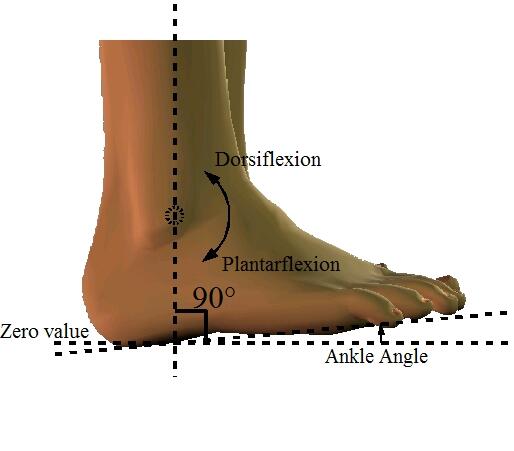 右図参照.
右図参照.膝関節角度の定義はEdrich-00-02を参照のこと. |
| 計測結果の表現方法 |
関節角度に対する指数関数(単位:Nm)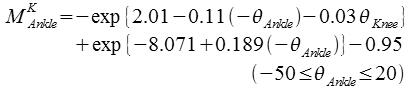 |
| 特徴 |
|
Engin-79-05
| 筆者 | Engin, A.E. |
| タイトル | Passive Resistive Torques about Long Bone Axes of Major Human Joints |
| 掲載誌 | Aviat. Space, Environ, Medic. |
| 巻号・ページ | 50巻10号 p.1052-1057 |
| 年 | 1979 |
| 関連文献 |
Engin-79-01 Engin-79-02 Engin-79-03 Engin-79-04 |
| 対象 |
関節:足関節 回転方向:回旋 特性:弾性 |
| 計測条件 |
被験者:男性3名 年齢範囲:- 計測国:アメリカ 方法:準静的釣り合いによる推定(type 1-3) |
| 定義 |
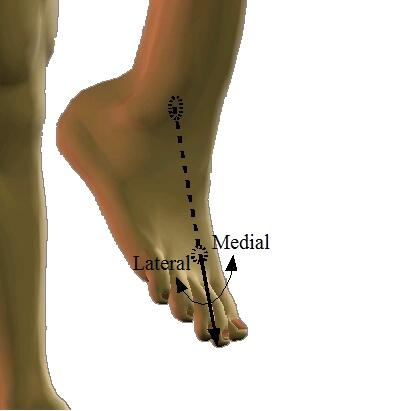 右図参照のこと.
右図参照のこと.足関節内外転に関しては角度定義が記述されていない.0位も定義されていないが,自然位を0位としているようだ. |
| 計測結果の表現方法 |
関節角度に対する非線形弾性特性モーメントのグラフ 関数形は示されていない. |
| 特徴 |
|
Fujita-98-01
| 筆者 | Fujita, K. and Sato, H. |
| タイトル | Intrinsic viscoelasticity of ankle joint during standing |
| 掲載誌 | Proc. Intern. Conf. of the IEEE eng. Med. Biol. Soc. |
| 巻号・ページ | 20巻5号 p.2343-2345 |
| 年 | 1998 |
| 関連文献 | |
| 対象 |
関節:足関節 回転方向:屈伸(背屈-底屈) 特性:粘弾性 |
| 計測条件 |
被験者:10名 年齢範囲:- 計測国:日本 方法:動的釣り合いによる推定(type 2-2) |
| 定義 |
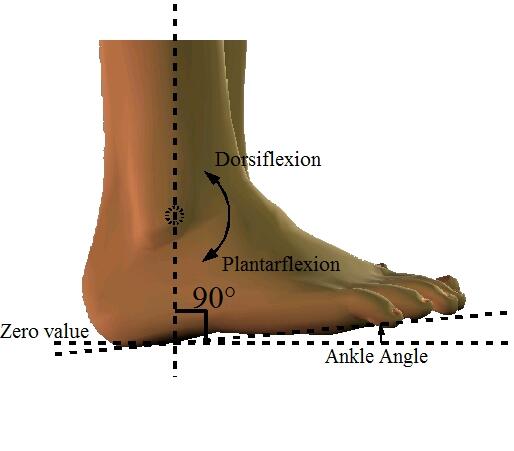
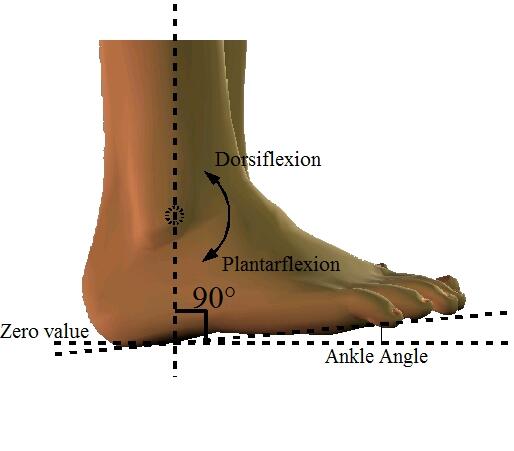 右図参照のこと.
右図参照のこと.足関節角度は,足底面と腓骨骨頭と内果を結ぶ線が直角になるときを基準位置として定義される. |
| 計測結果の表現方法 |
3姿勢に対するそれぞれの粘弾性係数のグラフ 関数形は示されていない. |
| 特徴 |
|
HQL-00-04
| 筆者 | 社団法人人間生活工学研究センター |
| タイトル | 平成10年度即効的知的基盤整備委託調査研究 「人間の動作等に係る動的特性の計測評価」(関節特性計測)調査報告書 |
| 掲載誌 | |
| 巻号・ページ | |
| 年 | 2000 |
| 関連文献 |
HQL-00-01 HQL-00-02 HQL-00-03 HQL-00-05 HQL-00-06 NITE 人間特性DB NITE 基本動態計測手法 |
| 対象 |
関節:足関節 回転方向:屈伸(底屈-背屈) 特性:弾性 |
| 計測条件 |
被験者:男性104名 女性113名 年齢範囲:20-79 計測国:日本 方法:準静的釣り合いによる推定(type 1-1) |
| 定義 |
 右図参照のこと. |
| 計測結果の表現方法 | |
|
関節角度に対する指数関数 男性右側:  世代別・性別・左右別の関数は本論参照のこと. |
|
| 特徴 |
|
Riener-99-01
| 筆者 | Riener, R. and Edrich, T. |
| タイトル | Identification of passive elastic joint moments in the lower extremities |
| 掲載誌 | J. Biomech. |
| 巻号・ページ | 32巻5号 p.539-544 |
| 年 | 1999 |
| 関連文献 |
Riener-99-02 Riener-99-03 Edrich-00-01 Edrich-00-02 Edrich-00-03 |
| 対象 |
関節:足関節 回転方向:屈伸(背屈-底屈) 特性:弾性 |
| 計測条件 |
被験者:男性10名 年齢範囲:23-29 計測国:ドイツ 方法:準静的釣り合いによる推定(type 1-1) |
| 定義 |
 右図参照のこと.
右図参照のこと.膝関節角度の定義はRiener-99-02を参照のこと. |
| 計測結果の表現方法 |
関節角度に対する指数関数(単位:Nm) |
| 特徴 |
|
Siegler-84-01
| 筆者 | Siegler, S., Moskowitz, G.D. and Freedman W. |
| タイトル | Passive and Active components of the internal moment developed about the ankle joint during human ambulation |
| 掲載誌 | J. Biomech. |
| 巻号・ページ | 17巻9号 p.647-652 |
| 年 | 1984 |
| 関連文献 | |
| 対象 |
関節:足関節 回転方向:屈伸(背屈-底屈) 特性:弾性 |
| 計測条件 |
被験者:健常者5名 片麻痺者1名 年齢範囲:23-39 計測国:アメリカ 方法:準静的釣り合いによる推定(type 1-1) |
| 定義 |
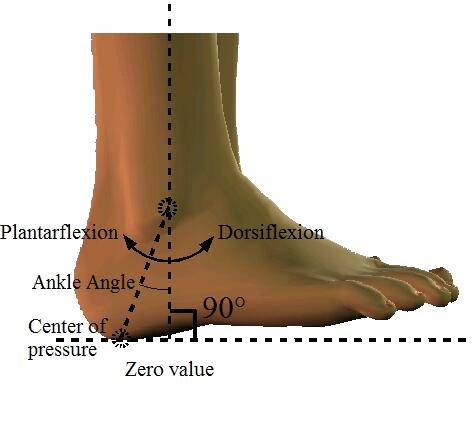 右図参照のこと.
右図参照のこと.厳密には足部と下腿節のなす角ではないことに注意. |
| 計測結果の表現方法 |
関節角度に対する非線形弾性特性モーメントのグラフ 関数形は示されていない. |
| 特徴 |
|
Weiss-86-01
| 筆者 | Weiss, P.L., Kearney R.E. and Hunter I.W. |
| タイトル | Position Dependence of Ankle Joint Dynamics-I. Passive Mechanics |
| 掲載誌 | J. Biomech. |
| 巻号・ページ | 19巻9号 p.727-735 |
| 年 | 1986 |
| 関連文献 | |
| 対象 |
関節:足関節 回転方向:屈伸(背屈-底屈) 特性:粘弾性 |
| 計測条件 |
被験者:6名 年齢範囲:22-32 計測国:カナダ 方法:動的釣り合いによる推定(type 2-2) |
| 定義 |
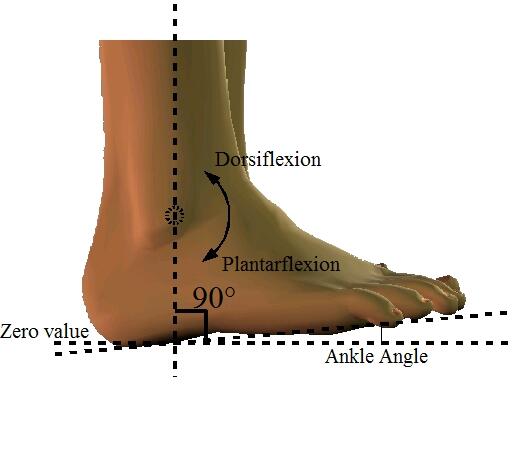 右図参照のこと.
右図参照のこと.足関節角度は,足底面と腓骨骨頭と内果を結ぶ線が直角になるときを基準位置として定義される. |
| 計測結果の表現方法 |
関節角度に対する粘弾性係数のグラフ 関数形は示されていない. |
| 特徴 |
|
 Copyright 2001-2003, Digital Human Laboratory, AIST.
Copyright 2001-2003, Digital Human Laboratory, AIST.
Copyright 2003-2015, Digital Human Research Center, AIST.
Copyright 2015-2018, Digital Human Research Group, HIRI, AIST.
Copyright 2018-2026, Digital Human Research Team, Artificial Intelligence Research Center, AIST.
All rights reserved. No reproduction or republication without written permission.