人体特性文献データベース|2.関節受動抵抗文献-関節受動抵抗について
関節受動抵抗とは?
関節受動抵抗とは,関節まわりの靱帯や腱,および関節包などの軟部組織により,運動方向に対して反対に働く抵抗のことである.これらの抵抗特性は,主に関節角度に対する関節まわりのモーメントで表わされることが多い.これらは,基本的には,筋力を発揮していない場合においての抵抗であり,他動的に関節を動かすことによって計測を行う.
関節受動抵抗は,ばね要素として働く弾性抵抗とダンパ要素として粘性抵抗に分けられる.弾性抵抗は,関節可動域の限界付近で大きく作用する.粘性抵抗は運動中に定常的に作用する.いずれも非線形特性であるが,粘性抵抗については線形近似して計測することが多い.
これらの特性は,特にデジタルマネキンやバイオメカニクスの分野において,運動の際の筋負荷を推定する際に重要である.また,これらの特性が,運動の効率を高めることや,運動原理に影響することを示した研究も多く,近年注目されている.
計測方法
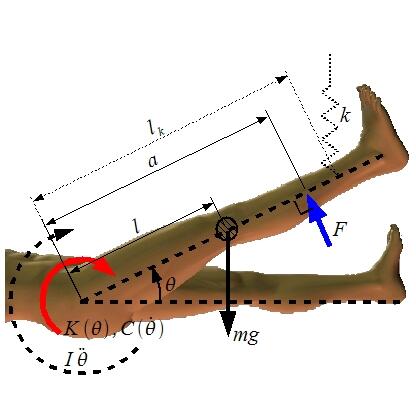
関節受動抵抗の計測については,(1)準静的釣り合いによる推定,(2)動的釣り合いによる推定,(3)屍体計測,の3種類に大きく分けられる.以下に,それぞれの方法の特徴を示す.図に記号の定義を示す.
(1)準静的釣り合いによる推定
この方法は,上位節を固定し,下位節を他動的に動かしたときの力(トルク)と節相対角度から関節弾性特性を求める方法である.以下の3種に大別できる.
(1-1)重力補正型推定
ある関節において,脱力した状態における矢状面内での回転の静的釣り合い式は次式のようになる.
 ・・・(1)
・・・(1)
節の長軸と直交するように節の端点を支え,節質量によるモーメントを差し引くことにより,関節弾性モーメントが求められる.関節角度はポテンショメータでの計測や標点計測からの推定で求める.節を支える力はロードセルなどで計測し,節の姿勢は機械的または人力で動かすことによって変える.
この方法では,節質量および節重心位置が必要となる.そのため,これらの推定方法が別に必要となり,その正しさが保障されるわけではない.しかしながら,被験者を仰向け,もしくはうつぶせに寝かせるなど,被験者の身体を固定しやすいため,比較的被験者の拘束は少ない.
(1-2)非重力方向運動型推定
前節の方法で,関節を地面に対して水平に動かすことによって,重力によるモーメント項をキャンセルできる.
 ・・・(2)
・・・(2)
この方法では,節質量および節重心位置が不要であるため,前節に比べて計測機器による精度だけ考慮すればよい.ただし,特に下肢関節の計測については,被験者の身体の拘束と姿勢の維持が困難であり,装置の大型化が顕著である.
(1-3)直接トルク計測型推定
前述までの方法をさらに発展させ,関節中心に作用するトルクを直接計測することも可能である.
 ・・・(3)
・・・(3)
この方法において,作用させるトルクは関節中心に取り付けたエンコーダにより計測できる.ただし,計測装置がさらに大型化することや,エンコーダ自身が抵抗になることもあることに注意されたい.
これらの方法の共通点として,下位節を動かすときの速度が速い場合,粘性抵抗の影響を大きく受けることに注意されたい.すなわち,下位節を往復運動させて計測する場合,速度を速く動かしたときにはヒステリシスが大きく現れる可能性が高い.しかしながら,簡便な計測方法であることから,関節弾性特性の計測にはこれらの方法がもっとも良く用いられている.また,逆に,このヒステリシスを利用して粘性抵抗を計測することも可能である.
(2)動的釣り合いによる推定
この方法は,主に静的釣り合いによる推定方法を動力学的に拡張する方法と,ロボット工学で用いられるインピーダンス計測の2種に分けられる.以下にその概要を示す.
(2-1)動力学的釣り合い
ある関節において,脱力させた状態で上位節を固定して下位節を振動させた時の運動は次式のようになる.
 ・・・(4)
・・・(4)
ここで,ばね係数や関節からばね力の作用点までの距離を適度に調節すると,(4)式は次式と等価になる.
 ・・・(5)
・・・(5)
よって,振動させたときの波形より減衰率を求めることが出来れば,節角速度に対する線形の粘性抵抗係数が求められる.
この方法では,慣性モーメントが必要となる.そのため,慣性モーメントの推定・計測方法が別に必要となる.また,実際には重力項や関節弾性抵抗項の影響を完全に除去することは困難である.
さらに,受動的に関節を動かしたとき,関節粘性抵抗は他の項に比べて影響が大きく,振動させることが困難であることがわかっている.そのため,(4)式の左辺第4項をばね振動ではなく,荷重の振子現象として扱う方法や,外部から力を加えて能動的に振動させる方法も積極的に使われている.
(2-2)インピーダンス計測
この方法は,もともとロボットアームの動特性を調べるための方法である.主に上肢,特に肘や手首の計測の場合,非重力方向への運動を行うことにより,(4)式の右辺をキャンセルすることが出来る.ここで,外部から外トルクを加えて関節を動的に動かしたときの式は以下のようになる.
 ・・・(6)
・・・(6)
時刻tにおける弾性係数,粘性係数,慣性モーメントをそれぞれ関節角度,関節角速度,関節角加速度に対する線形の係数とする.このとき,計測結果として時系列データでおよび外トルクが計測できたとすると,(6)式をラプラス変換することによって,弾性係数,粘性係数,慣性モーメントがそれぞれ角度変位の線形係数として再定義されることがわかっている.これらを用いて運動中の各パラメータを求めることができる.
なお,これらの係数は時刻によって一定にならないことに注意されたい.すなわち,これらのパラメータは,生体物理定数として使われる静的な関節抵抗や慣性モーメントではなく,姿勢などの影響を考慮した動的なパラメータになっている.よって,一般的な身体モデルへ本手法により得られているパラメータを導入する場合には,粘弾性係数を関節角度変化を変数とする関数形で再定義して用いる必要がある.
(3)屍体計測
前章までの方法は生体計測であるが,脊椎の受動抵抗を計測する場合には,前章の方法を屍体に適用して直接計測を行う例が多い.特に,自動車の衝突解析に用いているパラメータはほぼ屍体計測によるパラメータである.この方法では,死後硬直などに理由により,生体特性よりも硬化する傾向があると考えられる.
角度・抵抗モーメントの定義
角度定義は研究者間でもさまざまであり,統一的な定義を定めるのは困難である.しかしながら,角度の運動方向については,ほぼ同じ定義を用いているため,本HPでは角度の運動方向と,その角度に対して作用する受動抵抗モーメントの作用方向を,文献によらず統一している.本HPにて受動抵抗モーメントが関数形で表わされている場合は,以下の定義に従っていることに注意されたい.
(1)角度
屈曲・外転・外旋側に運動する方向を正,伸展・内転・内旋側に運動する方向を負とした.ただし,関数形で表記されているのは,屈伸方向の角度がほとんどである.
なお,本HPの定義と異なる文献については,文献の式を大きく変化させないよう配慮して掲載している(θ→(-θ)で表わす,など).
(2)抵抗モーメント
伸展・内転・内旋側に動こうとするときの抵抗モーメントを正,屈曲・外転・外旋側に動こうとするときの抵抗モーメントを負とした.ただし,関数形で表記されているのは,屈伸方向の抵抗モーメントがほとんどである.
また,本HPでは,角度は[ラジアン]ではなく,[度]で表わしている.そのため,本HPの形式と異なる文献については,文献の式を大きく変化させないよう配慮して掲載している(θ→θ×180/πで表わす,など).
 Copyright 2001-2003, Digital Human Laboratory, AIST.
Copyright 2001-2003, Digital Human Laboratory, AIST.
Copyright 2003-2015, Digital Human Research Center, AIST.
Copyright 2015-2018, Digital Human Research Group, HIRI, AIST.
Copyright 2018-2026, Digital Human Research Team, Artificial Intelligence Research Center, AIST.
All rights reserved. No reproduction or republication without written permission.